November 15, 2003
morph3
デザインと性能は「二律背反」ではない??morph3開発者インタビュー
ロボカップ-2002では残念ながら本来の性能を見せることができなかった「morph3」だが、その洗練されたデザインは会場の注目を浴びた。一見、単に趣味的に見える外見だが、実際にはヒューマノイドを設計するということの本質を問いかけるものだったのだ。「やりたい放題」というアプローチで誕生したmorph3の全てを聞いた。
ロボットの“運動神経”がコンシューマ機器にも??RTOS「VxWORKS」
産業機器のみならずデジタル家電などにも採用が増えている組み込みOS「リアルタイムOS」
iTRON/Linux/WindowsCEなどに注目が集まるが、航空宇宙/防衛/産業機器分野で定評のあるウインドリバー「VxWORKS」も、ヒューマノイドロボットからコンシューマ機器にまで採用が広がっている。
http://www.lleedd.com/morph3/index.html
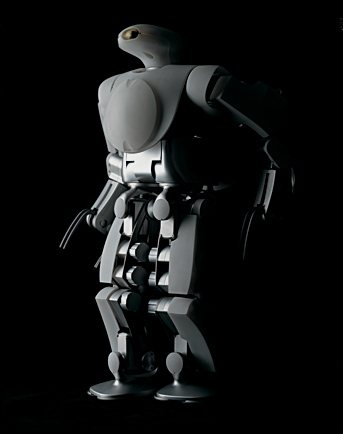
[morph3 仕様]
身長:380mm
体重:2,4kg
自由度:合計 30 自由度
頭部:4自由度(目2含む)
腕部 (2腕):12自由度(6x2)
腰部:2 自由度
下半身 (2脚):12自由度(6x2)
CPU:VR5500 (NECエレクトロンデバイス他
制御系 OS:VxWorks (WindRiver 社)
センサー:111個
(ジャイロ、加速時計、足裏センサー、触覚力センサー、地磁気センサー等)
外部通信・信号伝送系無線モジュール:Bluetooth Module(村田製作所)
Trackback on "morph3"
このエントリーのトラックバックURL:
"morph3"へのトラックバックはまだありません。
"morph3"へのコメントはまだありません。